プロジェクト
現在、企業及び自治体等と実施している当研究室で進行中のプロジェクト(共同研究・受託研究)です。建築防災、建築計画、建築人間工学に関わるテーマで複数の共同研究を実施しています。
研究手法は対象に合わせて、
1)行動観察(人の行動を知る)2)心理調査(人の心を知る)3)実験・シミュレーション(人のメカニズムを知る)
ためのさまざまな手法を用いています。
群集制御:駅、劇場における旅客行動調査・群集実験・ベンチ利用調査
(公財)JR鉄道総合技術研究所、JR東日本鉄道株式会社 (株)竹中工務店技術研究所 フクビ化学工業
駅における経路探索(迷いやすさ)+サイン調査、誘導灯の評価実験
![[image]](http://sanolab.e6.valueserver.jp/wordpress/wp-content/uploads/2011/04/station.png "駅における旅客行動調査")


・ベンチレイアウト変更による利用者行動調査・心理評価実験(2023~2024) 共同研究:フクビ化学工業、田町ビル
山手線駅前のペデストリアンデッキにおいて、実際にベンチを設置し、レイアウトを変えながら調査することで、利用行動・心理評価を行いました。

・J:COMホール八王子における避難訓練調査(2010~,2022-2024実施)調査協力:佐野友紀研究室
市民向けに実際のコンサートを行い、避難の様子を撮影・分析しました。


・都心駅前広場における行動観察調査(2023.4~進行中) 共同研究:大成建設(株)
駅前広場において、行動観察のために映像撮影を行い、分析しました。
働き方改革:オフィスにおけるワーカー行動調査
![[image]](http://sanolab.e6.valueserver.jp/wordpress/wp-content/uploads/2011/04/office.png "オフィスにおけるワーカー行動調査")
オフィスにおけるカフェコーナーの使われ方調査
行動観察:美術館・博物館の行動調査、モデル化
・早稲田大学會津八一記念館、村上春樹ライブラリー、歴史館 (株)乃村工藝社、(株)丹青社



早稲田大学 博物館における行動観察調査、行動のモデル化
ユニバーサルデザイン:人間工学実験、サイン研究、車いす避難実験
国土交通省 建築研究所 東京理科大学 (株)竹中工務店
![[image]](http://sanolab.e6.valueserver.jp/wordpress/wp-content/uploads/2011/04/crowd.png "人間工学実験・群集実験・車いす避難実験")
車いすによる避難行動調査、階段を降下できる避難用車いす(EVAC-Chair)の評価
防災・避難計画:避難行動実験、高層建築物・地下街避難調査、国際共同研究(ルンド大学(Sweden)、カンタベリー大学(New Zealand))
東京理科大学 (株)竹中工務店 総務省消防庁消防研究センター 外資系情報系企業
Lund University (Sweden), Canterbury University ( New Zealand)
![[image]](http://sanolab.e6.valueserver.jp/wordpress/wp-content/uploads/2011/04/evac.png "人間工学実験・群集実験・車いす避難実験")



共同研究の様子@Lund Univesity(2022-09-13) 右:センサーでスウェーデンの高齢者の行動を観察可能な実験住宅

大学院ゼミでの海外渡航、大学院生、卒業生、一部学部生が参加:Lund大学での国際ワークショップ参加(2023-09-19)
群集流動シミュレーション共同開発:
SimTread(Good Design賞 受賞)
A&A (CADソフト VectorWorksの開発企業) (株)竹中工務店

研究成果:
シミュレーション事例(Clickすると動画が見られます)
さまざまな現実場面における現地調査およびシミュレーションによる検討を実施している。
・大規模駅における避難シミュレーション(東京都内ターミナル駅)
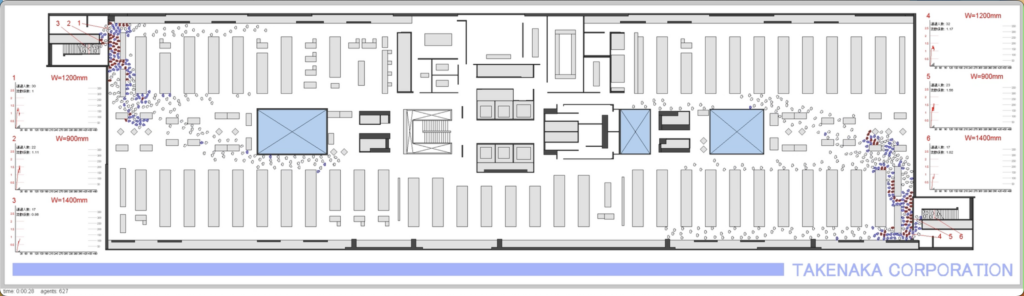
・オフィスにおける避難シミュレーション(ゼネコン本社ビル 避難訓練再現)
・劇場における避難シミュレーション(東京都内劇場における避難訓練コンサート実施および再現)
・飛行機における避難シミュレーション(国内空港 航空機事故再現)
近未来生活の検討:ロボット共生研究
千葉大学 日本大学 文化学園大学 文部科学省科学研究費
![[image]](http://sanolab.e6.valueserver.jp/wordpress/wp-content/uploads/2011/04/robot.png "ロボット共生研究")